AriGraph_ Learning Knowledge Graph World Models with Episodic Memory for LLM Agents
发表时间:202407
会议/期刊:IJCAI
作者:Petr Anokhin Russia
论文链接:https://arxiv.org/pdf/2407.04363
代码/数据集链接:
Tag:
ABSTRACT
llm 的先进能力已经创造了一个坚实的地基为发展全自动化 agent。有了正确的 tools,这些 agents 能够学习解决环境中遇到的任务通过积累和更新他们的知识。
当前的基于 llm 的 agent 梳理过往经验使用完整的结果记忆,摘要,检索扩充。
然而,这些非结构化的记忆表征,不能促进推理和规划针对复杂的决策制定。
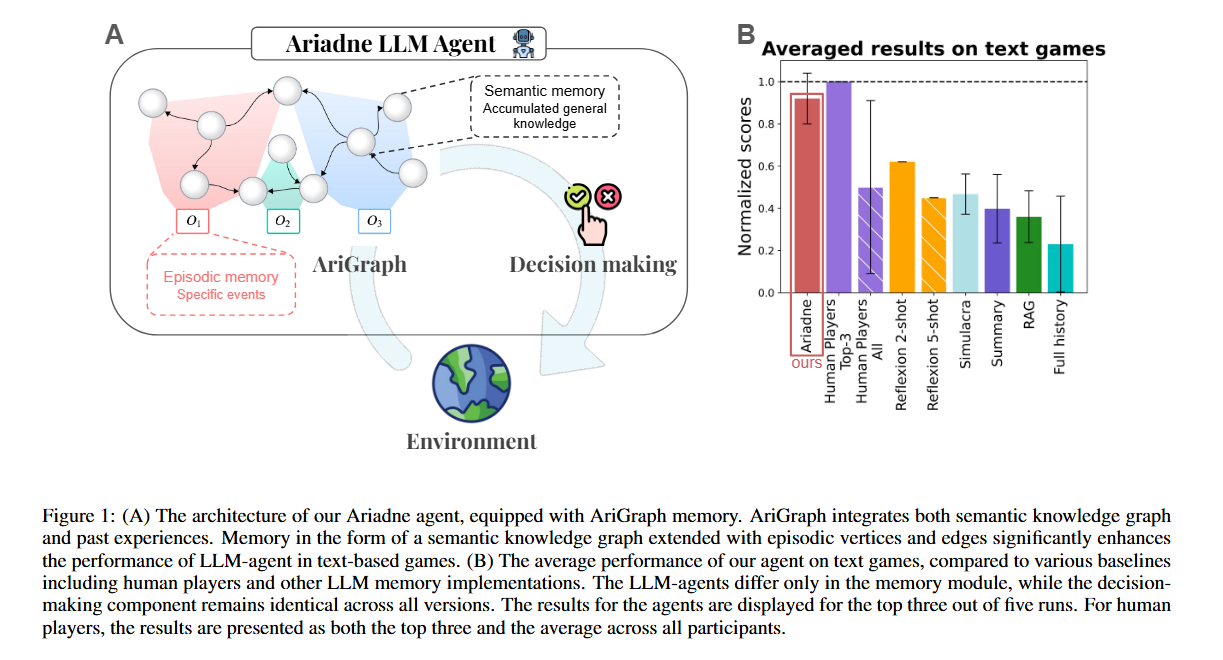
在我们的研究中,我们介绍了 AriGraph,一个新颖的方法(agent 构建和更新一个记忆图,整合了语义和一系列探索环境的记忆)。
我们证明了我们的 Ariadne LLM Agent,由增设了规划和决策制定的新型记忆架构构成,使用交互式文本环境有效解决了复杂的任务,这些任务人都感觉到难。
结果展示,我们的方法显著的超越了其他资深的记忆方法和强壮的 RL Baseline 在一系列多样性的复杂任务。
其次,AriGraph 证明了有竞争力的性能对比专门 graph-based 方法在静态 multi-hop 问题提出。
PROBLEM TO SOLVE
problem description:
RQ1:Can LLM based agents learn useful structured world model <u>from scratch(从 0 开始) </u>via interaction with an environment?
RQ2:Does structured knowledge representation improve retrieval of relevant facts from memory and enable effective exploration?
Limitations of Existing Methods
现有方法的问题是:记忆是非结构化的
1.Full history:把所有的历史 observation/action 都塞进上下文
2.Summary mem:不断总结历史
3.Vector RAG:把过去经验向量化,按相似度检索
4.Reflection memory:失败后总结经验,下次使用
METHOD
overview
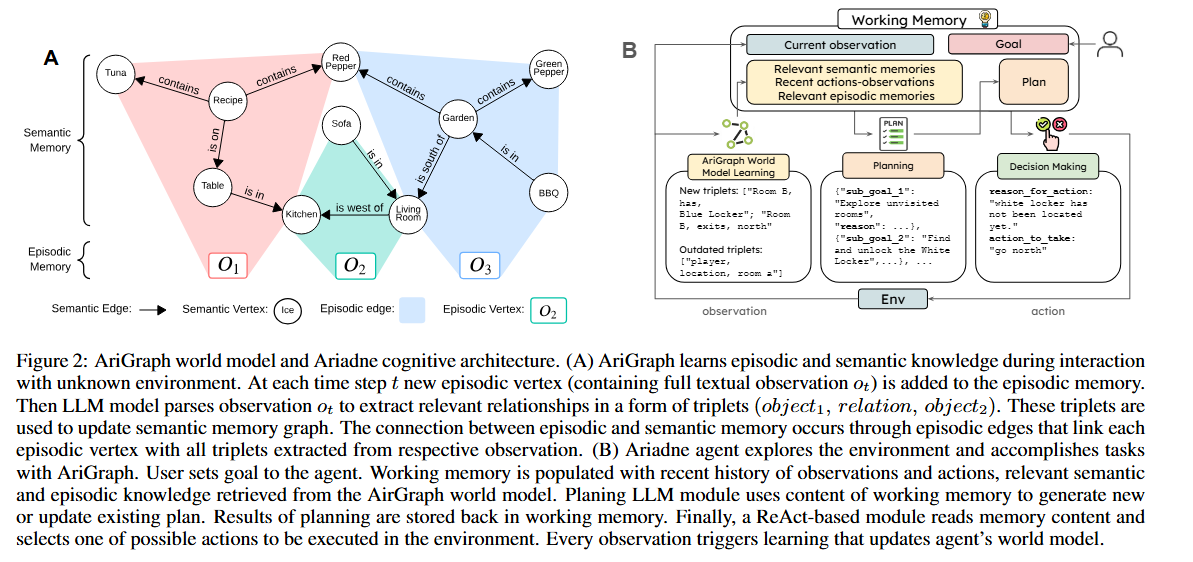
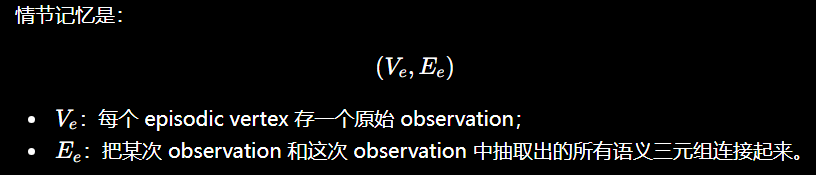
Agent 每一步接收文本观察,然后 LLM 抽取三元组,更新语义图;同时把原始 observation 存成 episodic vertex,并用 episodic edge 把这次观察和抽取出的三元组连接起来。之后规划器和决策器都从工作记忆里读取这些图检索结果。
| 名称 | 作用 |
|---|---|
| AriGraph | 记忆 / 世界模型模块 |
| Ariadne | 使用 AriGraph 的完整 Agent 架构 |
pipeline
1 | |
AriGraph 定义核心数据结构

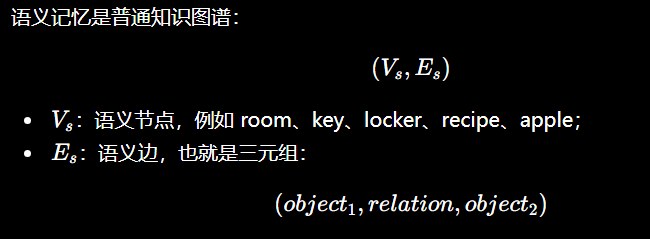
Constructing AriGraph:From observation to Dynamic world model
step1:LLM 抽取三元组。LLM 从 observation 抽取三元组,抽取的结果要短、具体、原子化
step2:检测过时的边。环境是动态的,所以图不能只增不删
step3:更新 semantic graph。把新实体和新边加入,同时删除过时边
step4:更新 episodic memory(情景记忆)
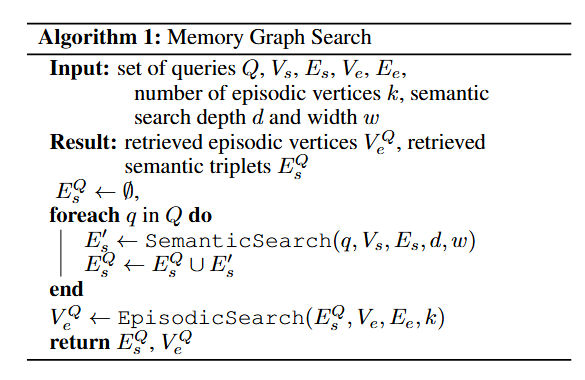
图检索过程:semantic search+Episodic search
AriGraph 的检索不是简单 top-k 向量检索,而是两阶段。
1.Semantic Search:先找相关三元组(搜索过程也会定义搜索深度 d 和搜索宽度 w)
query → relevant triplets → related entities → more triplets
2.Episodic Search:找相关历史观察。Semantic Search 得到一批相关三元组后,系统会通过 episodic edges 找到与这些三元组相关的历史 observation。
Ariadne Agent 架构:图记忆如何参与规划和决策
1 | |
1.工作记忆:
- 当前 observation;
- 最近几步 observation/action;
- 主目标;
- 上一轮 plan;
- 从 AriGraph 检索出的 semantic memories;
- 从 AriGraph 检索出的 episodic memories;
- 未探索出口信息。
2.Planning:生成或更新子目标
Planner 根据工作记忆生成 plan
3.Decision Making:ReAct 动作选择
Exploration 机制
AriGraph 不只是记忆,还辅助探索。它会从图中抽取类似:
1 | |
然后检测当前房间有哪些“已发现但未探索”的出口。这样 Agent 可以系统性探索环境,而不是靠 LLM 自己猜。
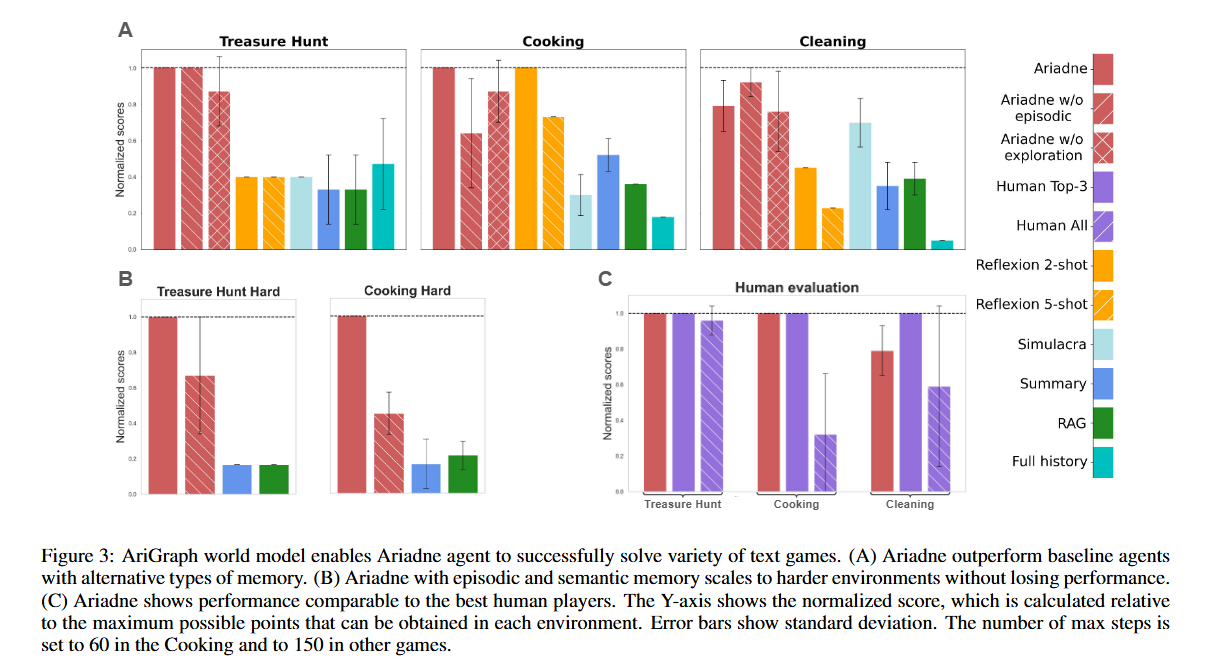
这个机制对 Treasure Hunt 这种导航任务很重要,因为 Agent 必须构建地图、找到钥匙、箱子和目标物。论文的实验表明,去掉 exploration 后性能会下降
CONTRIBUTION
Claimed Contributions
ProPosed by the author
Personal Assessment
My opinion: Novelty(new tasks? new dateset? new concept? innovation? new gap? new theory? Combinatorial methods? )
EXPERIMENTATION
Dataset:
BaseLine:
Result:
Ablation experiment:
Case Study: